An introduction to disk drive modeling
‘An introduction to disk drive modeling’ by Ruemmler and Wilkes published in IEEE Computer 1994 describes the components and workings of hard disk drives (HDDs) with the aim of improving disk simulations. Over the years, the workings of HDDs have stayed qualitatively similar even in the face of orders of magnitude improvements in the quantitative aspects (e.g., capacity, throughput). This post discusses some of the interesting and pertinent aspects of HDD internals as described in the paper, while also borrowing briefly from other related works [1, 2].
HDDs consist of multiple components: a data recording and accessing mechanism (spinning disks and heads), a positioning mechanism that moves the head to access the data, a mechanism to ensure that the head stays in the correct position, buffer memory, a controller that acts as a go-between the host and the disk’s data access mechanisms, and a bus interface to the host.
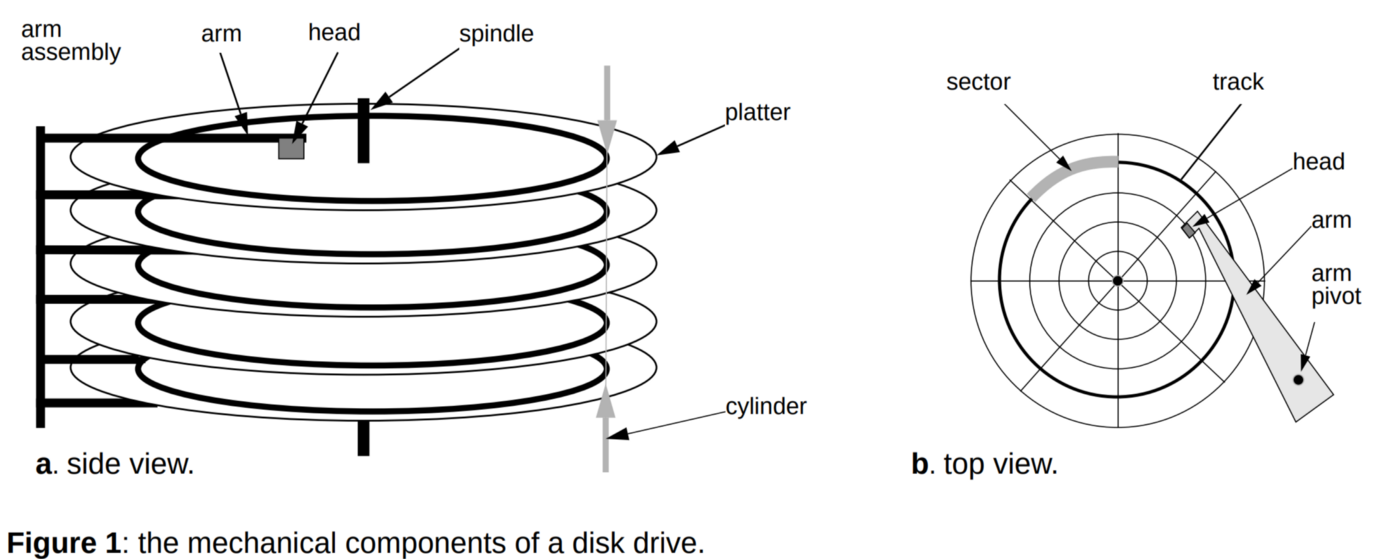
The recording component of the disk consists of multiple spinning disks called platters. Each platter is coated with a magnetic material. The orientation of the magnetic field on the platter encodes the data (0 or 1). Each platter has a corresponding head for reading and writing data from the platter. To read the data on a track, the head senses the analog magnetic field on the platter, converts it to a digital bit stream based on the direction of the magnetic field, and sends it to the controller. Writing data on the track follows the reverse path, with the head manipulating the orientation of the magnetic field on the platter.
The platters continuously spin around a spindle at a fixed speed (e.g., 7200 rpm) and consist of multiple concentric tracks. Each track is further divided into sectors. All sectors in a disk are of the same data size (e.g. 512 bytes) and the controller reads or writes data at the granularity of a sector. To access a sector, the corresponding platter’s head is first moved to the corresponding track. This positioning of the head, called seeking, is performed around a pivot that connects to the head via an arm.
A seek consists of four phases: a speed up to a certain speed or distance, coasting at a constant speed, slow down as the head gets close to the track, and settling on the exact track (this is required because of high track density, discussed below). The total time it takes to seek to a track and its breakdown across the four components is a function of the seek distance. Once the head is positioned over a track, it waits for and subsequently accesses data from the required sector as the platter spins underneath it. Thus the latency to access data depends on the seek time and the rotational speed of the platter. Once the head is located above the required sector, the data access rate (throughput) is determined by the rotational speed of the platter.
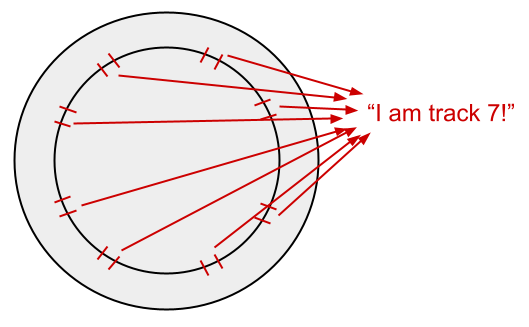
Seeking to and staying on the required track is challenging because of high track density and the minute but non-negligible imperfections in the track layout (e.g., non-circular or non-concentric tracks). To help with this, track-identifying information, called servo bursts, is interspersed throughout the track. Servo bursts are predetermined per-track bit sequences, something like “I am track 7!”. The head continuously reads these servo bursts and sends them to the controller, which moves the head as required. To actuate a head movement, the controller applies power to the pivot motor. The amount and duration of power to apply is encoded in the controller as a function of the seek distance.
HDDs expose their addressable space as consecutive blocks and the controller maps these logical blocks to sectors. The controller lays out consecutive data blocks over consecutive sectors in a track, over the same track in consecutive platters, which is called a cylinder, and finally, over consecutive cylinders. At any given point, only a single head accesses data from a single platter. Although accessing data simultaneously from a cylinder using all the heads is possible, it is rarely used because of the challenges in positioning all the heads at the same exact track in each platter. Servo bursts are used to switch heads in a cylinder and the settling portion of a seek is used to move the head to an adjacent track.
Accessing data sequentially from a HDD is faster than accessing it randomly; random accesses require seeking to random tracks whereas sequential accesses are served from the same track or tracks in the same or adjacent cylinders and require minimal seeking.
An optimization to further improve sequential access performance is track skewing. The starting sector in adjacent tracks are offset by a skew factor. The skew factor is set such that in the expected time for a track switch, the platters spin just enough to bring the head to the starting sector of the new track. With such a skew, the head can continue accessing data sequentially after moving to an outer track. If the starting sectors of adjacent tracks were aligned, the head would have to wait for almost an entire rotation after moving to an outer track to continue accessing data.
An interesting effect of the platter’s shape is that accessing data along the outer tracks is faster than accessing data from inner tracks. To understand the reasoning behind this, first consider that the data density (i.e., data per unit length) is kept near-constant to its highest possible value to maximize the HDD capacity. Further, consider that outer tracks are longer than inner tracks. Thus outer tracks pack more data than inner tracks. As a result, for a given amount data, the head has to perform fewer seeks (which leads to faster accesses) when accessing data from outer tracks.
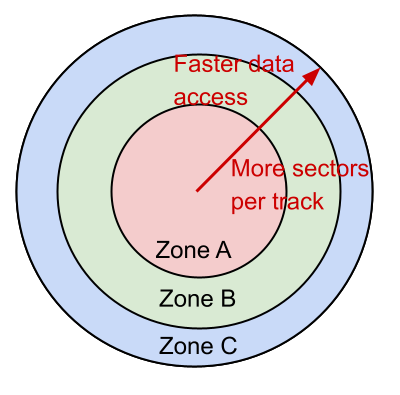
The longer outer tracks also have more sectors per track because sectors are of fixed data sizes. The hard drive divides tracks into zones, with tracks in the same zone having the same number of sectors per track. Why zones and why not variable number of sectors per track? This is because extra track length between any two consecutive tracks may not be enough to pack an entire sector’s worth of data. This is also the reason why the data-density is near-constant and not constant.
HDDs use the on-disk buffer memory to cache writes and read-ahead to mask the seeking latency and rotation-speed-limited data access rate. Write-back caching enables absorbing a burst of writes without becoming bottle-necked on the platters. With write-back caching, the disk can acknowledge a write as completed after committing it only to the cache (buffer memory) and write it to the backing location (disk platter) at a later point. This poses interesting trade-offs regarding data durability, e.g., what if the data is lost upon a power failure (buffer memory is volatile). Read-ahead refers to reading more than the requested data (e.g., reading an entire track when only a sector was requested) and caching it so that subsequent sequential reads can be served from the cache. Read-ahead also presents interesting trade-offs regarding the value of the read-ahead size in comparison to other uses of the limited buffer memory size (e.g., write-back caching)
The paper makes for a great read and discusses many other aspects like the bus interface between the host and HDD, sparing, typical seek lengths and their power requirements, and the metrics to consider when building a HDD simulator. I’ll end this summary with an observation, rather interesting in hindsight, that the paper refers to ‘hard disk drives’ as just ‘disk drives’, because only few were thinking or talking about solid-state disk drives (SSDs) in 1994!
References
- More than just an interface — SCSI vs ATA, Anderson, Dykes, and Riedel, FAST 2003
- Hard Disk Drives, Arpaci-Dusseau and Arpaci-Dusseau, Operating Systems: Theee Easy Pieces (OSTEP) v1, 2018